איזה יופי, לפני בערך שנה המפתחים של בטא (betaflight) הגיבו בצורה מתבקשת לעובדה שהרבה חנג'ים עם משקף ושתי אנטנות על הראש (אנחנו) מתחילים למתוח את גבולות הפארק המקומי שלהם וטסים למרחקים באמצעות מערכות רדיו שפועלות על 868/915 מגה הרץ.
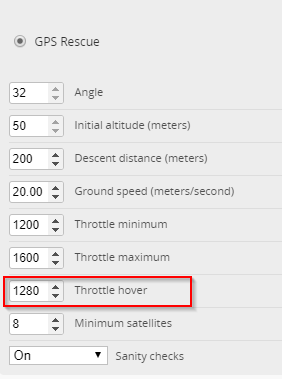
אבל מה ?? במקרים רבים אותו יום טיסה עם החברים הפך להיות טיול אתגרי בחיק הטבע, התפלשות בביצות ושחיה בכל מיני נחלים, ולכן הם החליטו לאמץ את אחד התכונות המתבקשות שיש לדוגמא ברחפני DJI או ב INAV – חזרה הביתה. ולא, לא מדובר בהומאג' לסרט הסיני המוצלח מ 2014, אלא באפשרות להגדיר לרחפן שאם אבדה הקליטה (רחמנא ליצלן) או סתם הלך לכם פתאום הוידאו, הוא יחזור למקום ממנו המריא.
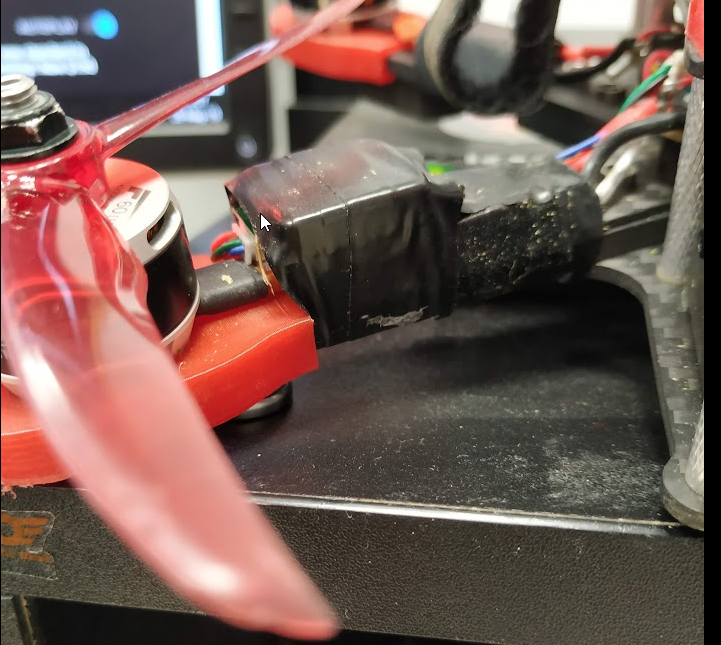
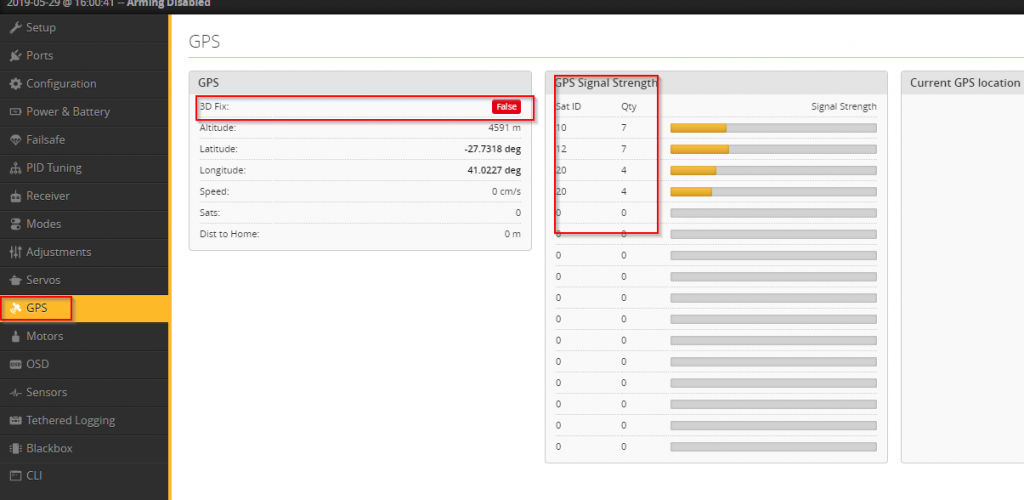
על מנת שהדבר הנחמד הזה יעבוד צריך לתקוע על הרחפן GPS, לא צריך עם COMPASS.
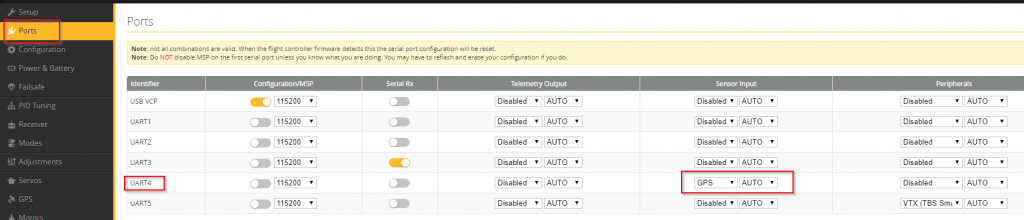
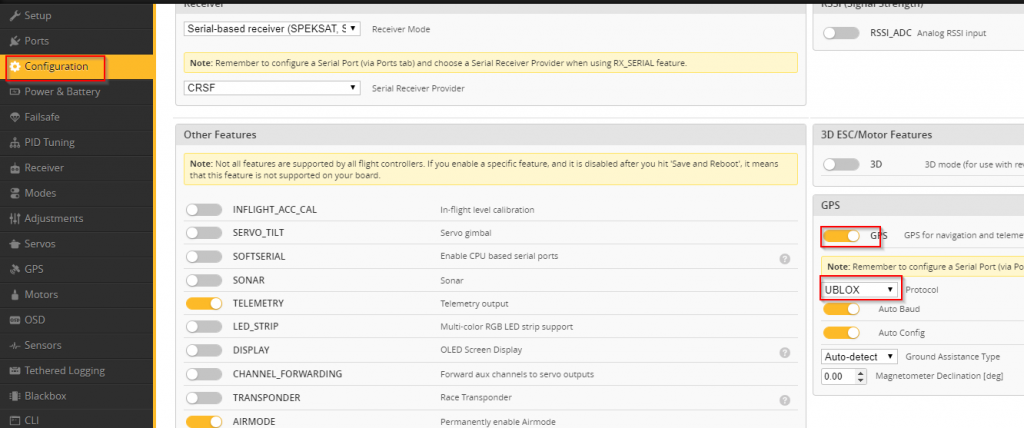
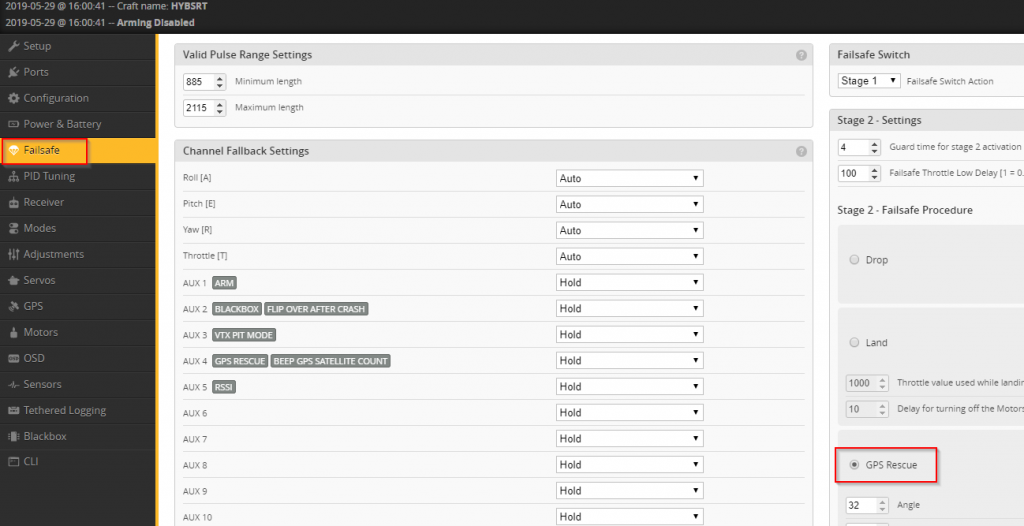
בהמשך הדף נראה לכם כיצד להגדיר ואיך לפתור תקלות נפוצות